We present ManipulaTHOR, a framework that facilitates visual manipulation of objects using a robotic arm. Our framework is built upon a physics engine and enables realistic interactions with objects while navigating through scenes and performing tasks. Object manipulation is an established research domain within the robotics community and poses several challenges including avoiding collisions, grasping, and long-horizon planning. Our framework focuses primarily on manipulation in visually rich and complex scenes, joint manipulation and navigation planning, and generalization to unseen environments and objects; challenges that are often overlooked. The framework provides a comprehensive suite of sensory information and motor functions enabling development of robust manipulation agents.
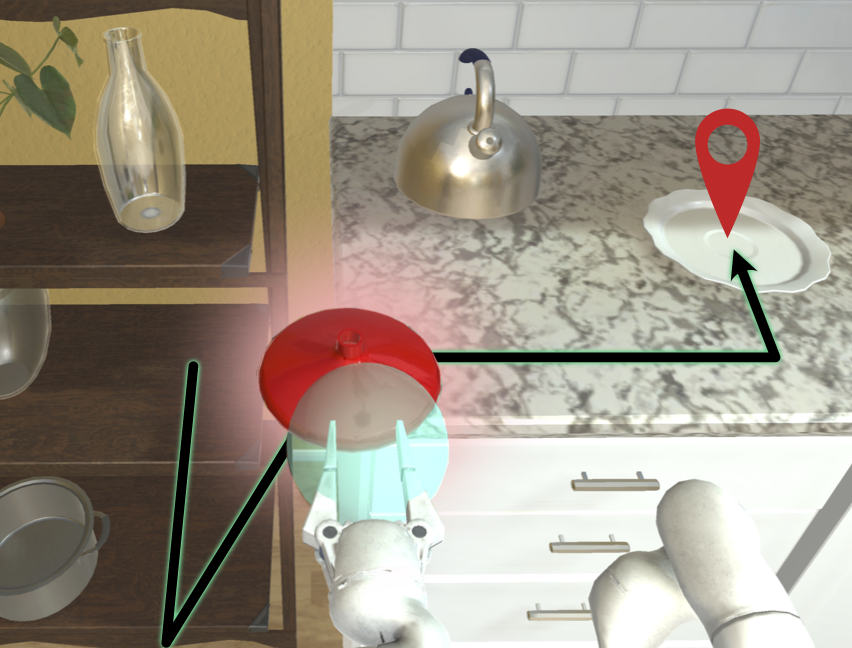
ManipulaTHOR, enables us to address the problem of visual object manipulation, where the goal is to move an object between two locations in a scene. Operating in visually rich and complex environments, generalizing to unseen environments and objects, avoiding collisions with objects and structures in the scene, and visual planning to reach the destination are among the major challenges of this task. Below, we illustrate a sequence of actions taken a by a virtual robot within the AI2-THOR environment for picking up a vase from the shelf and stack it on a plate on the countertop.