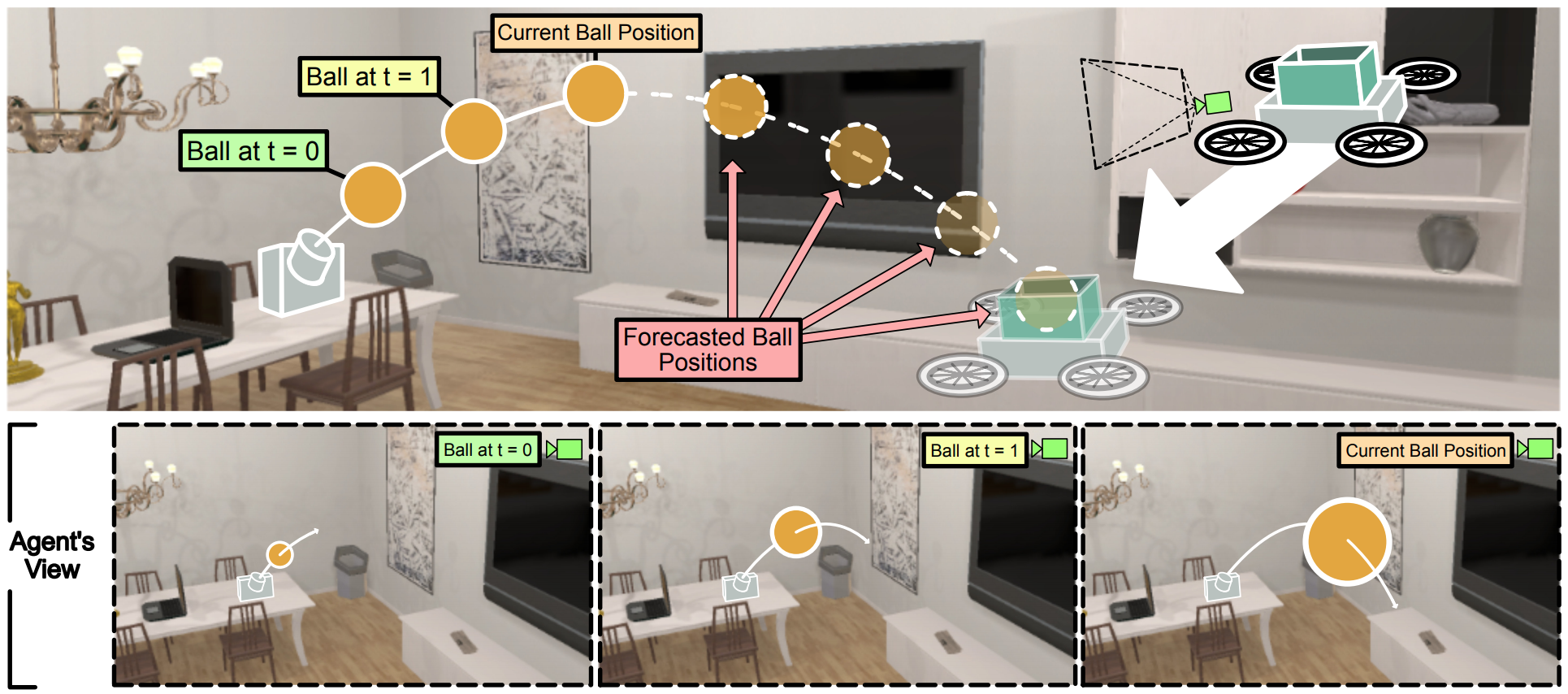
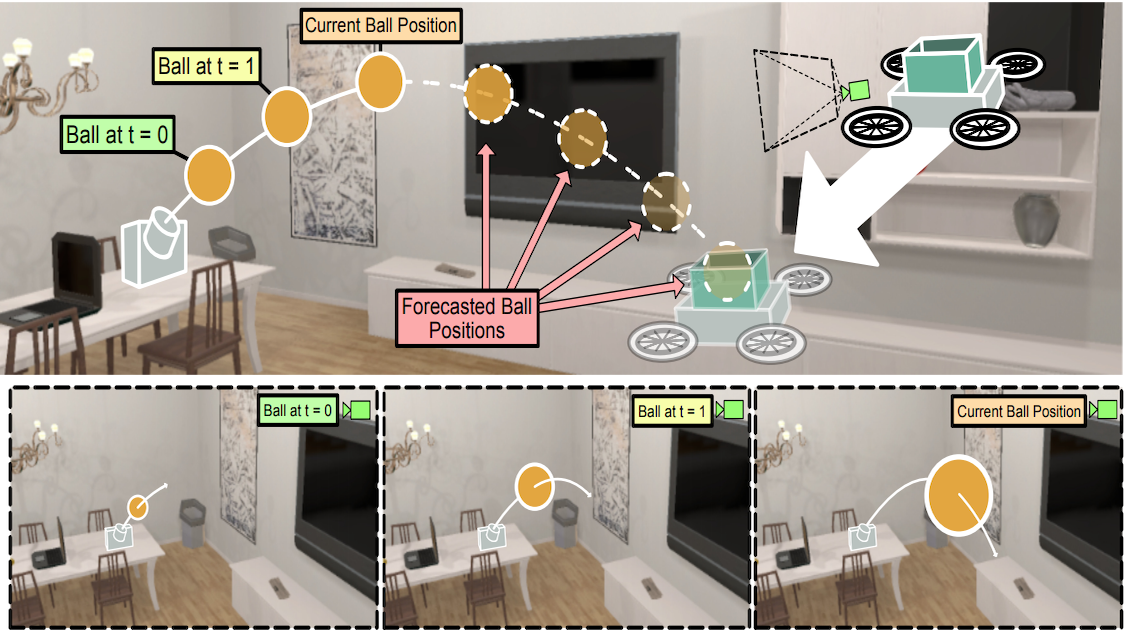
We address the problem of Visual Reaction, where the idea is to forecast the future and plan accordingly. We study the task in the context of catching objects with a drone. An object is thrown in the air, and the drone should plan to catch it. Each object has different physical properties and might collide with other objects and structures in the scene, making the task quite challenging.