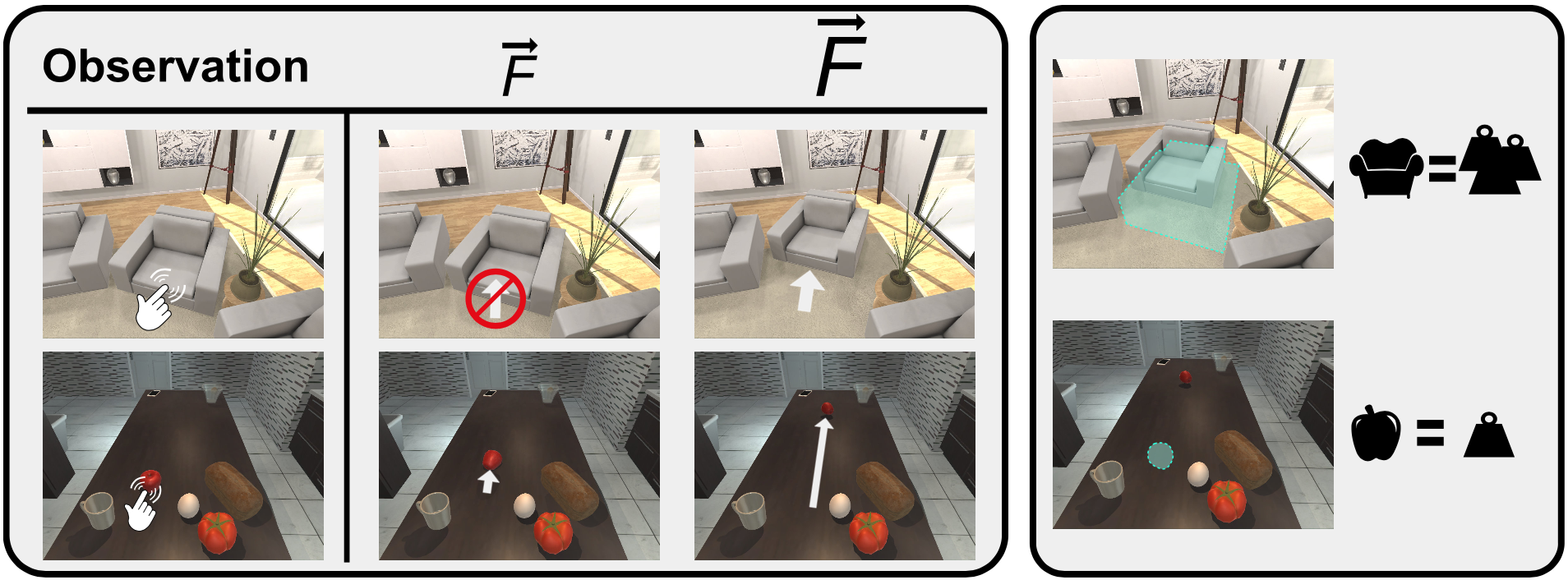
Much of the remarkable progress in computer vision has been focused around fully supervised learning mechanisms relying on highly curated datasets for a variety of tasks. In contrast, humans often learn about their world with little to no external supervision. Taking inspiration from infants learning from their environment through play and interaction, we present a computational framework to discover objects and learn their physical properties along this paradigm of Learning from Interaction. Our agent, when placed within the near photo-realistic and physics-enabled AI2THOR environment, interacts with its world and learns about objects, their geometric extents and relative masses, without any external guidance. Our experiments reveal that this agent learns efficiently and effectively; not just for objects it has interacted with before, but also for novel instances from seen categories as well as novel object categories.
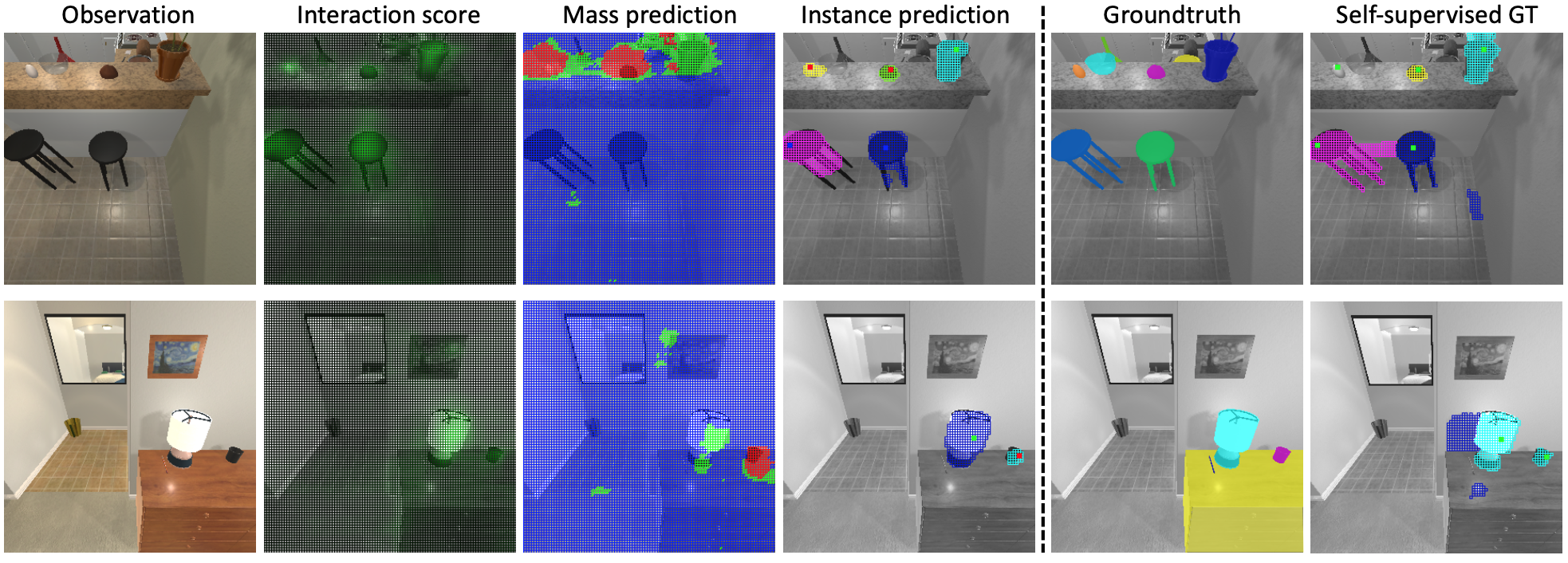
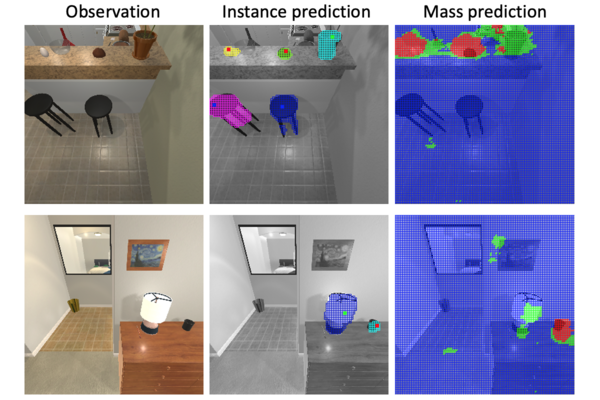
Below we show a qualitative animation of the learning process, as well as illustrations of the model predictions.